Biography
Hey! I am currently at OLA Electric working on 3D scene representation of end-to-end autonomous driving agents and self-supervised depth estimation and Mapping and Localization. On the development side of things, I have been involved in porting the PyTorch model to the TensorRT model for faster inference on resource-constraint devices. Developing ROS2 wrapper around the deep learning pipeline.
Previously, I have done my master’s from IISc Bangalore in Mechanical Engineering, Where I have worked on Optimal control in field of Thermal power plant.
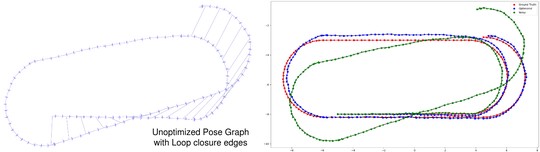
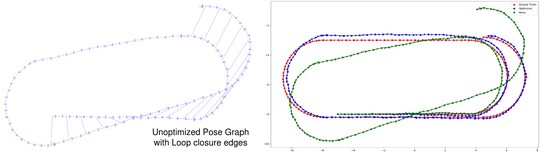
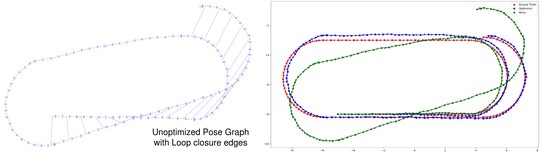
Our work on robust pose graph SLAM has been published at the ICRA conference and our work on Robust feature matching has been presented at the IROS conference. These works targets improving SLAM performance in feature-less regions and improving correspondence matching in high illumination and viewpoint variations.
Download my resumé.
Interests
- Optimal Control
- Physics informed neural network
- Optimization
- Robotics
Education
M.Tech Course work in Mechanical Engineering, 2021
Indian Institute of science, bangalore
B.Tech in Mechanical, 2016
Indian Institute of Technology (ISM), Dhanbad